前提条件
确保你的 Conda 环境中安装了 rclpy 包。如果没有安装,可以使用以下命令进行安装:
创建 ROS 2 发布节点
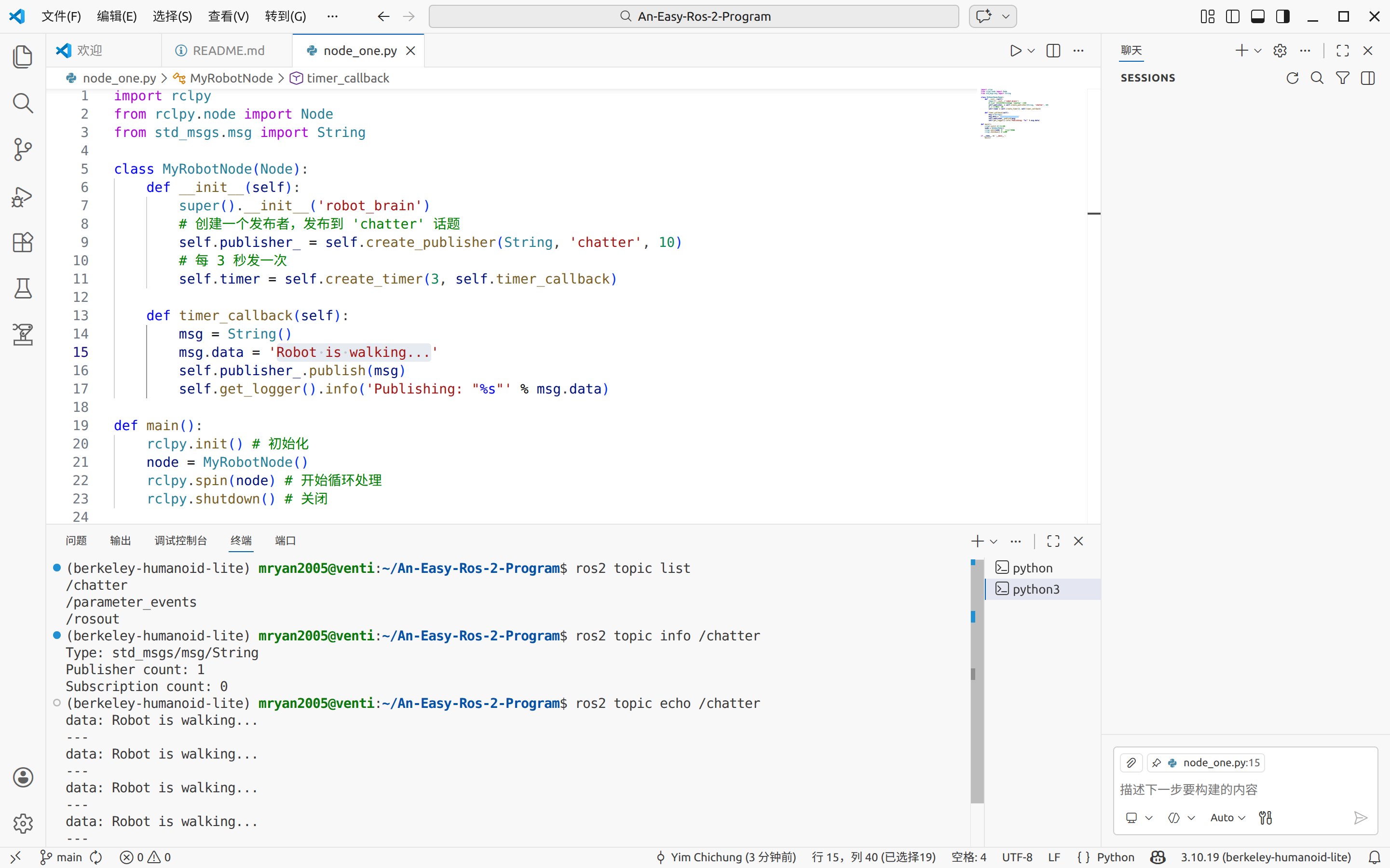
创建一个名为 simple_ros2_node.py 的 Python 文件,并添加以下代码:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
| import rclpy
from rclpy.node import Node
from std_msgs.msg import String
class MyRobotNode(Node):
def __init__(self):
super().__init__('robot_brain')
self.publisher_ = self.create_publisher(String, 'chatter', 10)
self.timer = self.create_timer(3, self.timer_callback)
def timer_callback(self):
msg = String()
msg.data = 'Robot is walking...'
self.publisher_.publish(msg)
self.get_logger().info('Publishing: "%s"' % msg.data)
def main():
rclpy.init()
node = MyRobotNode()
rclpy.spin(node)
rclpy.shutdown()
if __name__ == '__main__':
main()
|
创建 ROS 2 监听节点
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
| import rclpy
from rclpy.node import Node
from std_msgs.msg import String
class MinimalSubscriber(Node):
def __init__(self):
super().__init__('minimal_subscriber')
self.subscription = self.create_subscription(
String,
'chatter',
self.listener_callback,
10)
self.subscription
def listener_callback(self, msg):
self.get_logger().info('I heard: "%s"' % msg.data)
def main(args=None):
rclpy.init(args=args)
minimal_subscriber = MinimalSubscriber()
rclpy.spin(minimal_subscriber)
minimal_subscriber.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
|
运行节点
在终端中运行以下命令来启动你的 ROS 2 节点:
此时,你运行 ros2 topic list 会看到 /chatter。
监听 node_one.py 发出的东西
在终端中运行以下命令:
1
| ros2 topic echo /chatter
|
你就会看到 data: Robot is walking...
或者
你就会看到 [INFO] [1770962759.315087388] [minimal_subscriber]: I heard: "Robot is walking..."
源码
GitHub: IsaacSimPlusROS2/An-Easy-Ros-2-Program