如何启动 Isaac Sim
在 VS Code 内输入以下代码
1
2
3
4
5
6
7
8
9
10
11
12
13
| from isaacsim import SimulationApp
simulation_app = SimulationApp({"headless": False})
from isaacsim.core.api import World
world = World(stage_units_in_meters=1.0)
world.reset()
while simulation_app.is_running():
world.step(render=True)
simulation_app.close()
|
理论上,如果配置成功,你就会看到 Isaac Sim Python 5.1
加载 Ros 2 Bridge 等扩展
1
2
3
4
5
6
7
8
9
10
11
12
13
| import omni.kit.app
from isaacsim.core.utils.extensions import enable_extension
enable_extension("omni.graph.action")
enable_extension("omni.syntheticdata")
enable_extension("isaacsim.ros2.bridge")
enable_extension("omni.isaac.ros2_bridge")
enable_extension("omni.replicator.core")
for _ in range(10):
omni.kit.app.get_app().update()
|
获得舞台
创建一个默认的地面
1
2
3
4
| from isaacsim.core.utils.prims import create_prim
create_prim("/World/GroundPlane", "Xform")
world.scene.add_default_ground_plane()
|
创建灯光
1
2
3
| sun = UsdLux.DistantLight.Define(stage, "/World/SunLight")
sun.CreateIntensityAttr(2000.0)
sun.CreateAngleAttr(1.0)
|
创建一个 Cube
1
2
3
4
5
6
7
8
9
10
11
12
| from isaacsim.core.api.objects.cuboid import DynamicCuboid
from pxr import UsdGeom
cube = DynamicCuboid(
prim_path="/World/Cube",
name="cube",
position=(0.6, 0.0, 0.4),
size=0.08,
)
world.scene.add(cube)
cube_prim = stage.GetPrimAtPath("/World/Cube")
UsdGeom.Gprim(cube_prim).CreateDisplayColorAttr([(1.0, 0.2, 0.2)])
|
且看上面的代码
我们在 $x$ 为 0.6, $y$ 为 0.0, $z$ 为 0.4 的地方上面创建了一个大小是 0.08 的 cube
创建一个 Franka 机械臂
1
2
3
4
5
6
7
8
| FRANKA_USD = (
"https://omniverse-content-production.s3-us-west-2.amazonaws.com/"
"Assets/Isaac/5.1/Isaac/Robots/FrankaRobotics/FrankaPanda/franka.usd"
)
franka = stage.DefinePrim("/World/FrankaRoot/Franka", "Xform")
franka.GetReferences().AddReference(FRANKA_USD)
franka.Load()
|
引入一个在线的 usd 资产,最好使用 https://omniverse-content-production.s3-us-west-2.amazonaws.com/Assets/Isaac/5.1/Isaac/ + xxxx
如何查看呢?看下图
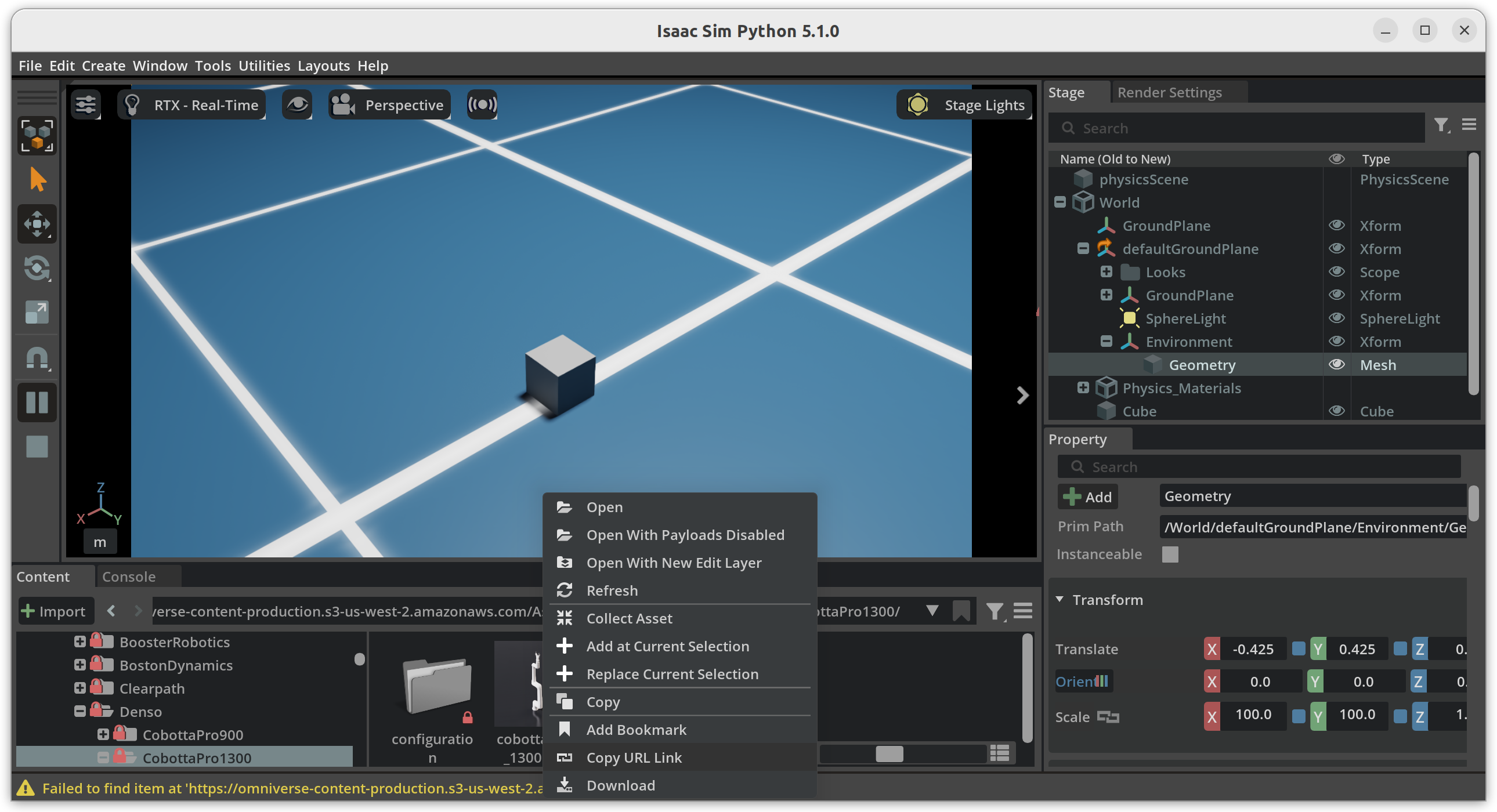
选择 Copy URL Link 即可
源代码
点击前往 GitHub 查看